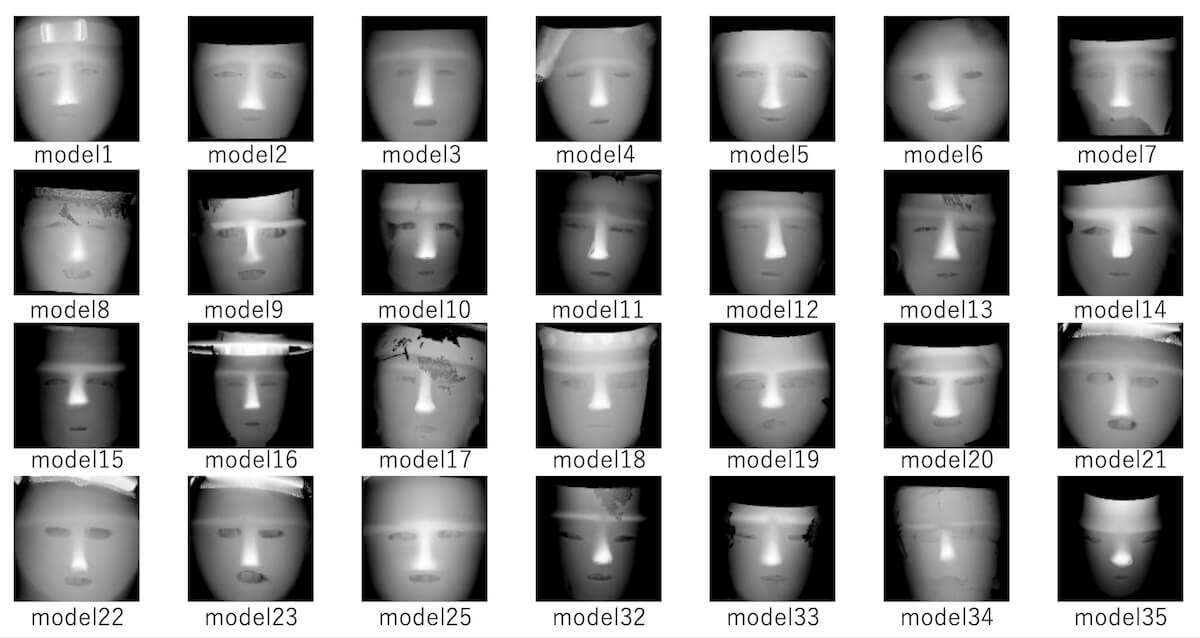
Facial Similarity Evaluation of Haniwa Figures
Issue: Haniwa classification often depends on subjective judgments based on shape and decorative observations, creating a need for objective and quantitative methods to support finer classification.
Method: Facial parts are automatically extracted from 3D point clouds and converted into depth images. Machine learning models then evaluate facial similarity from those depth images.
Result: The method enables numerical comparison of facial features and supports objective similarity evaluation.

Tumulus Distribution Prediction
Issue: Surveying undiscovered tumuli around widely distributed tumulus groups requires substantial labor, time, and cost.
Method: We focus on the relationship between UAV-LiDAR terrain point clouds and known tumulus distributions, and propose a deep learning method for estimating tumulus existence probability.
Result: The estimated probabilities are visualized as 2D heat maps and colorized 3D point clouds, allowing users to understand important terrain features and 3D terrain structure simultaneously.
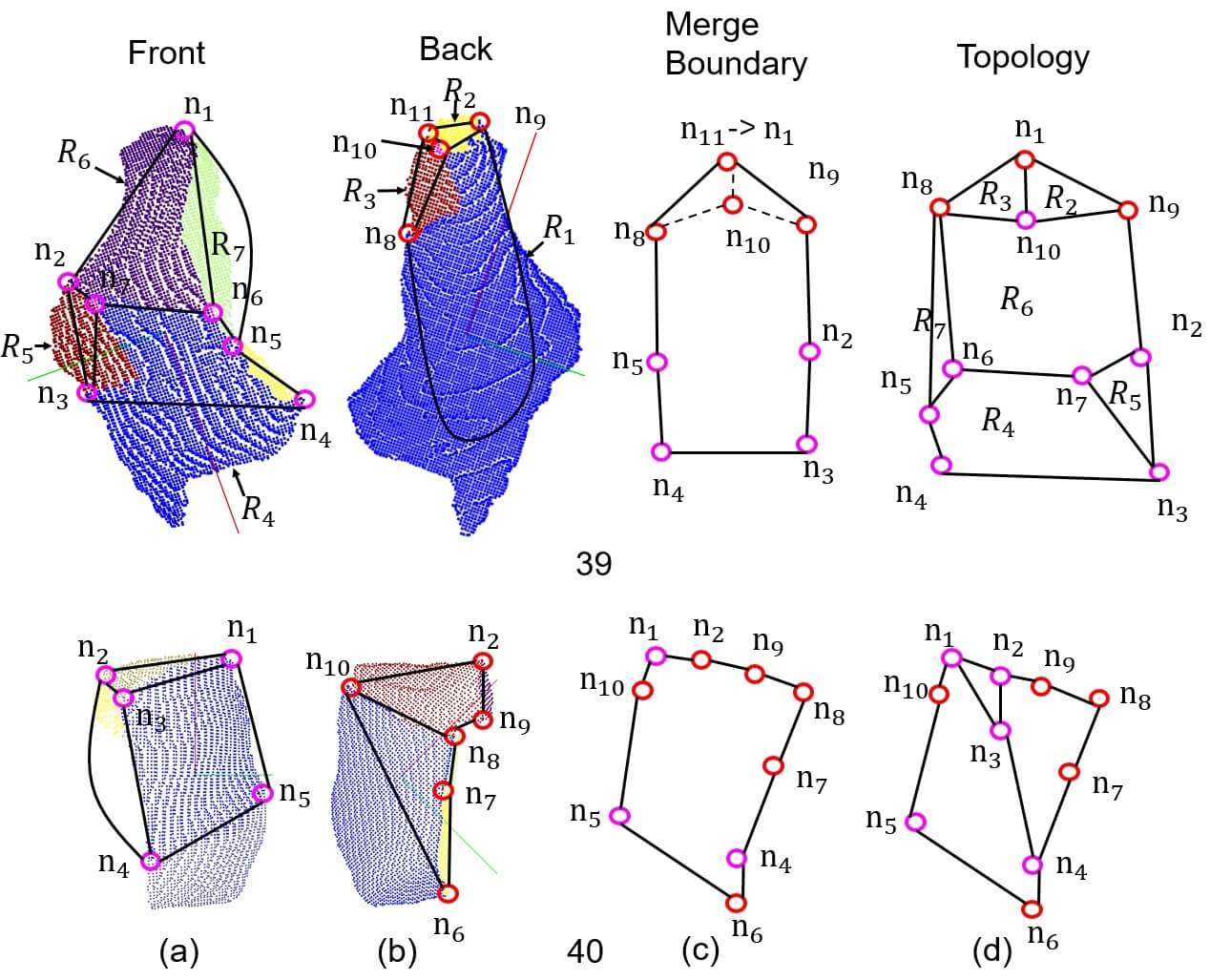
Extraction of 3D Topological Maps of Stone Tools
Issue: Stone tool analysis is still largely manual and visual, which requires considerable time and effort.
Method: Using point cloud data from 3D measurement, we propose a method that jointly extracts edge features and junction regions.
Result: The method enables accurate evaluation of surface sharpness and efficient, low-cost feature extraction for similarity computation of stone tool shapes.
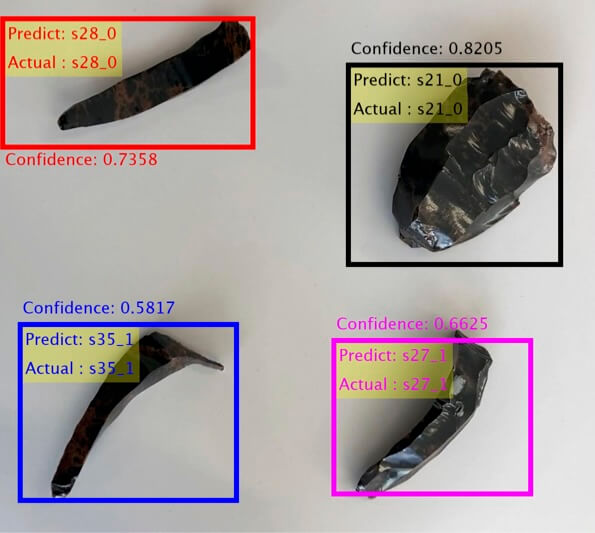
Image-Based Stone Tool Identification and Management Support
Issue: In the storage and management of excavated stone tools, human errors such as misidentification and bag mix-ups can occur.
Method: We use two stable-pose images defined for each stone tool and apply deep learning with CNNs and pretrained models.
Result: The approach achieved higher recognition accuracy and processing speed than previous work, and the high-performance model was implemented as a YOLO-based detector for practical use.
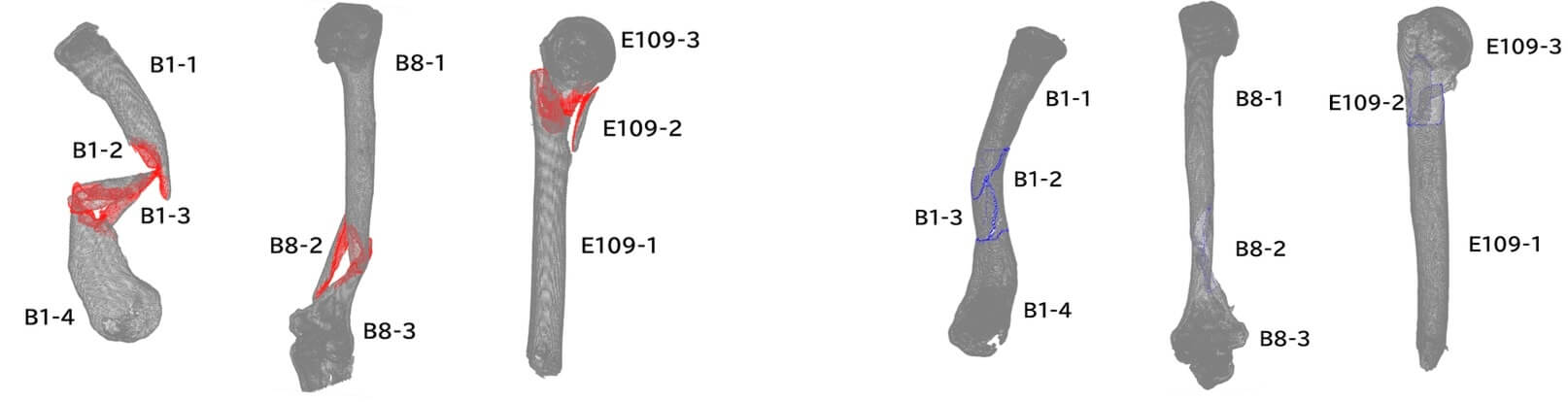
Reduction Simulation of Bone Fragments
Issue: In actual surgery, opportunities for trial and adjustment are limited, and aligning or visualizing bone fragments is difficult.
Method: Using measured point cloud data, the bone surface is separated into healthy and fracture surfaces, and bone fragments are automatically reconstructed by matching edge shapes.
Result: The simulation aims to improve preoperative planning efficiency and reduce trial and error during surgery.
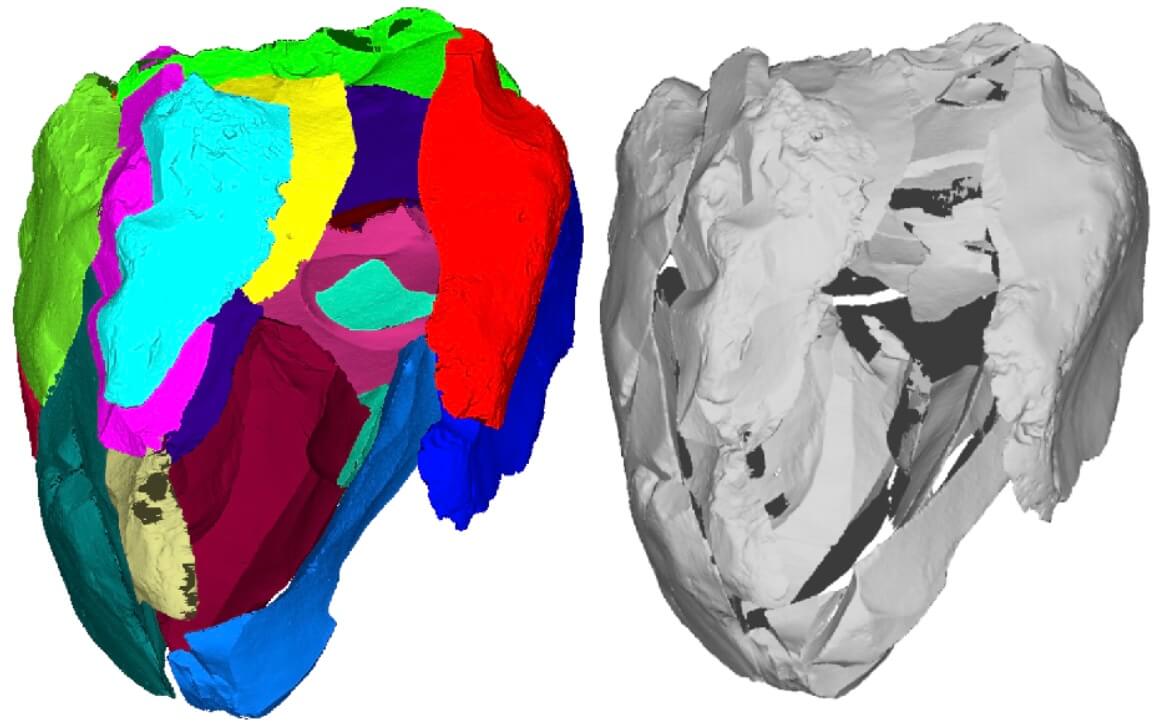
Stone Tool Reassembly
Issue: The goal is to reassemble fragmented stone tools accurately and efficiently.
Method: We propose a flake-surface matching algorithm with an emphasis on computational efficiency.
Result: Experiments with 43 stone tool point cloud models demonstrated fast and accurate reassembly.
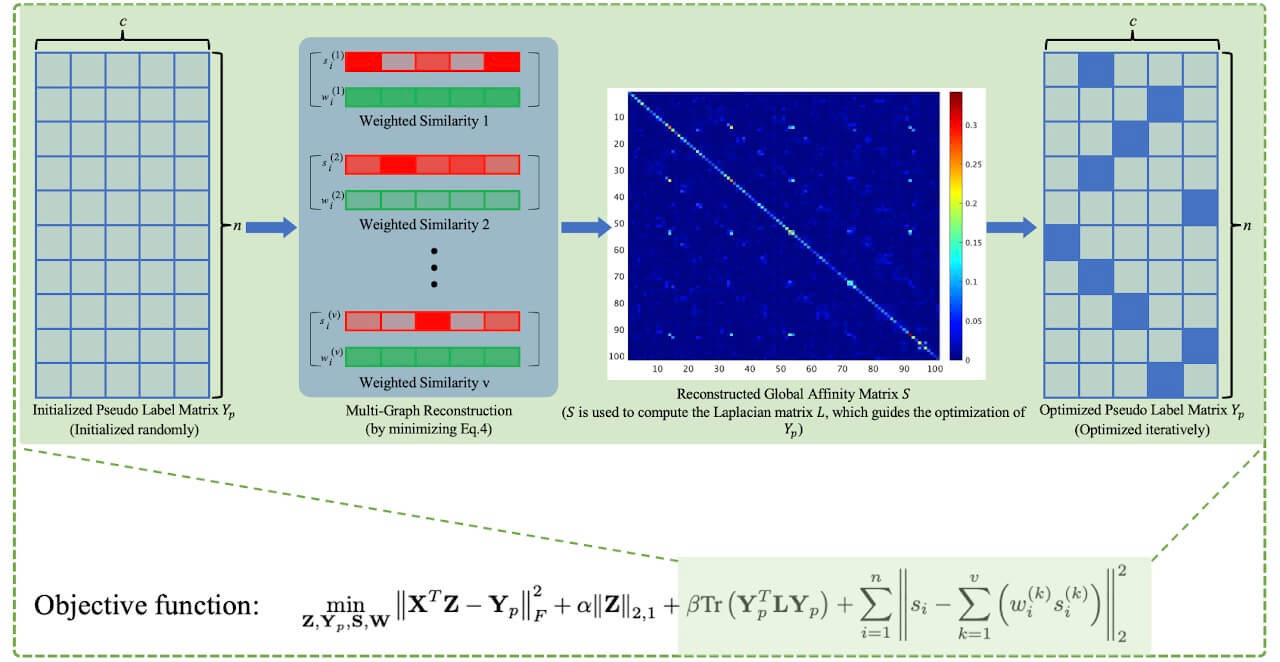
Hyperspectral Band Selection
Issue: Curse of dimensionality, data redundancy, high computational costs, and storage issues in hyperspectral imaging.
Method: Global Affinity Matrix Reconstruction.
Result: We proposed a method that identifies the most informative hyperspectral bands to enhance machine learning performance.
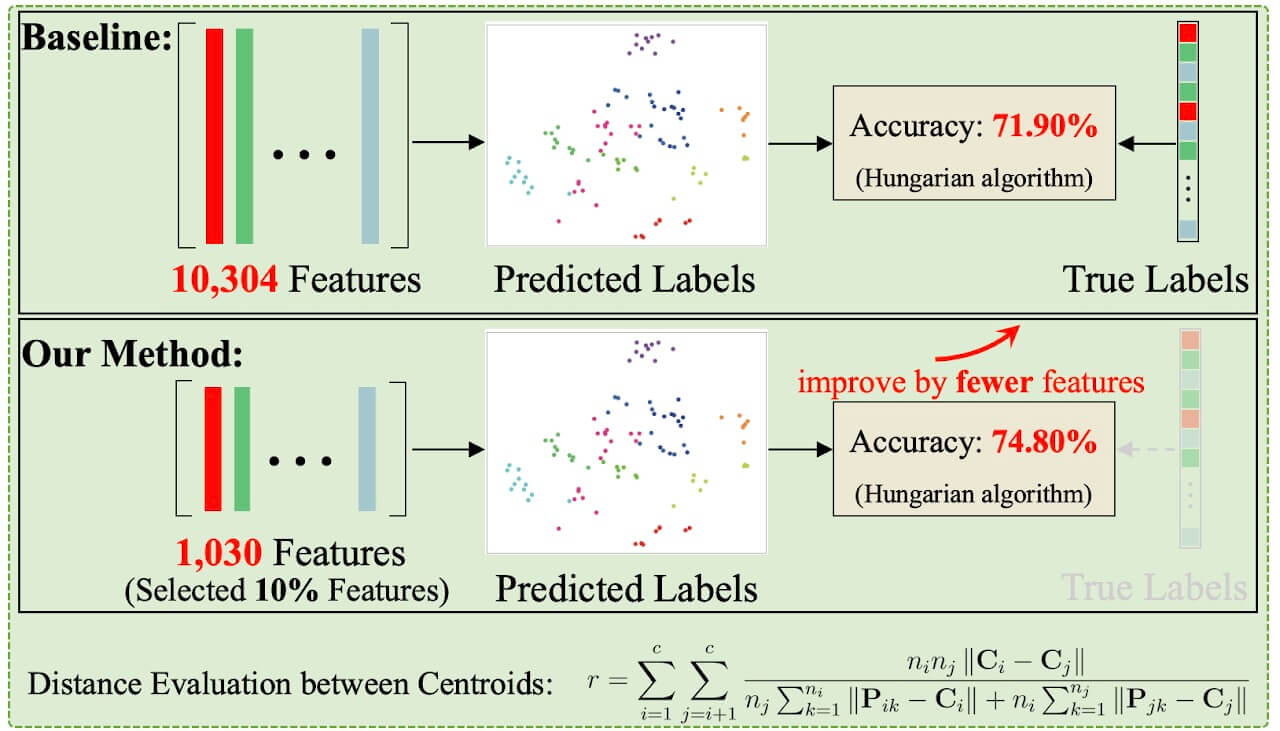
Feature Selection Validation
Issue: Curse of dimensionality, data redundancy, high computational costs.
Method: Compare clustering accuracy before and after applying feature selection.
Result: We verified that selecting the top 10% of representative features led to improved clustering accuracy.
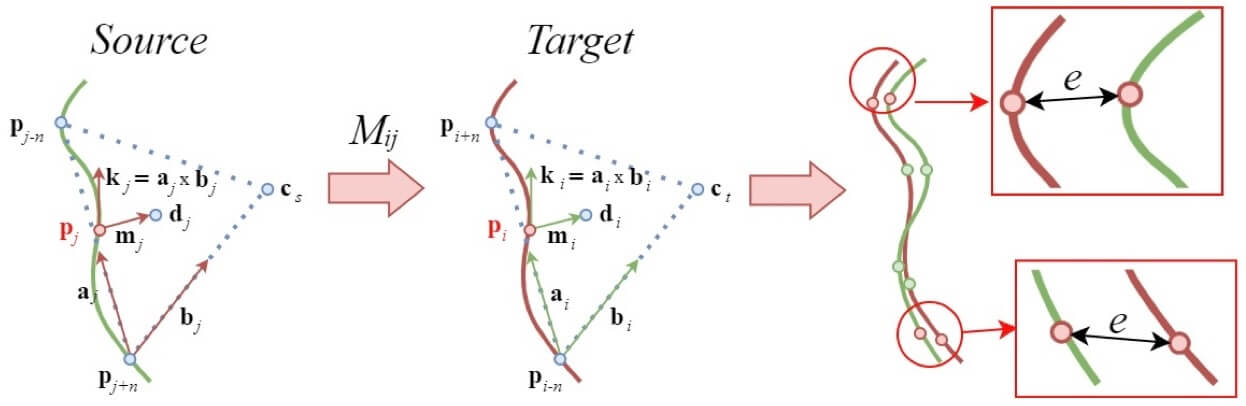
Partial Shape Matching
Issue: How to estimate the internal 3D pose of the joining material?
Method: Divide-and-conquer strategy.
Result: We propose a method that performs partial shape matching between flake surfaces and joining material surfaces based on point cloud measurements, enabling more accurate alignment and fitting.

Component Reassembly Assistance
Issue: How to assist with component reassembly?
Method: Recording and replaying the disassembly sequence with simple marker detection.
Result: We propose a method to support component reassembly by guiding users through the recorded disassembly order, enabling faster and more accurate assembly.
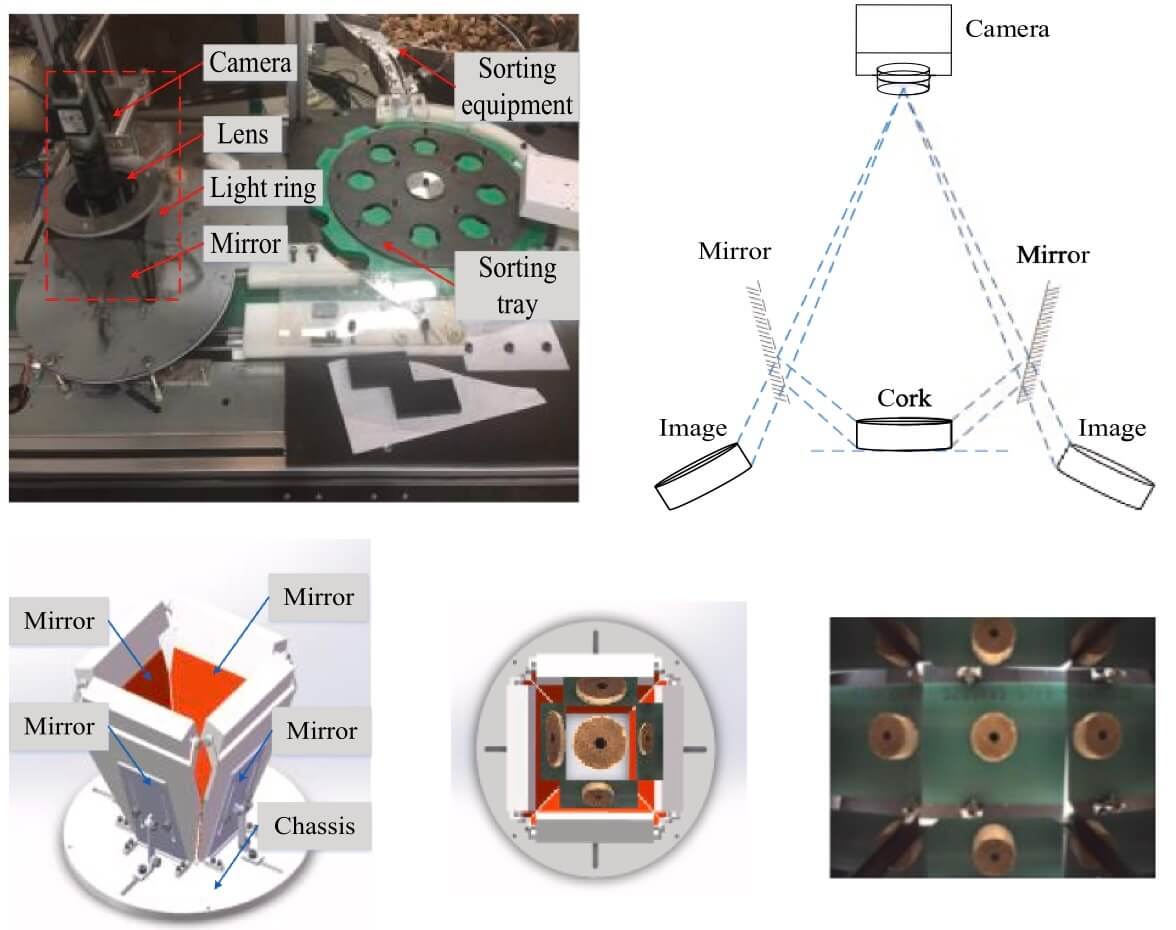
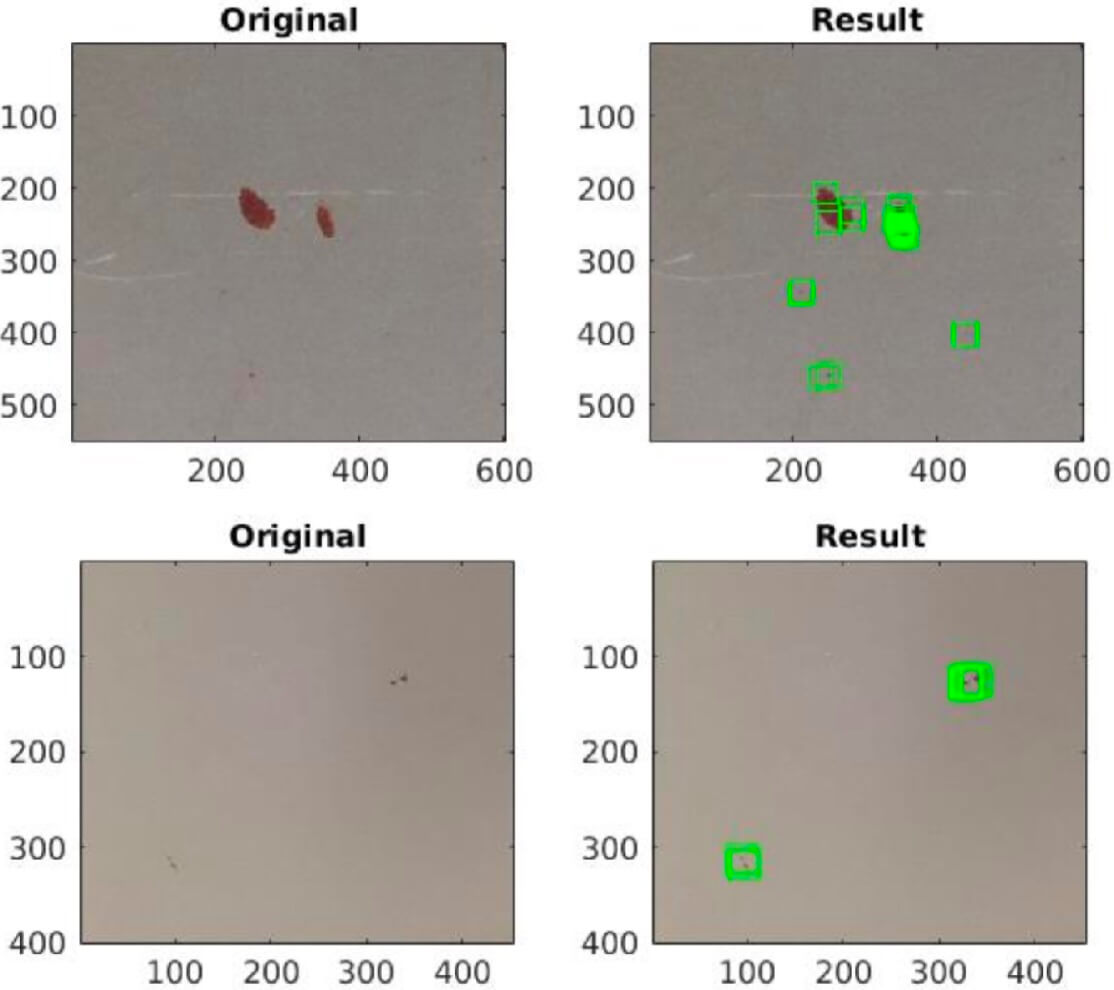
Wine Cork Inspection
Issue: How to automate the inspection of wine corks for scratches or damage?
Method: Multi-scale Faster R-CNN.
Result: We propose a machine vision system to automatically detect the presence, severity, and type of scratches or damage on wine corks.
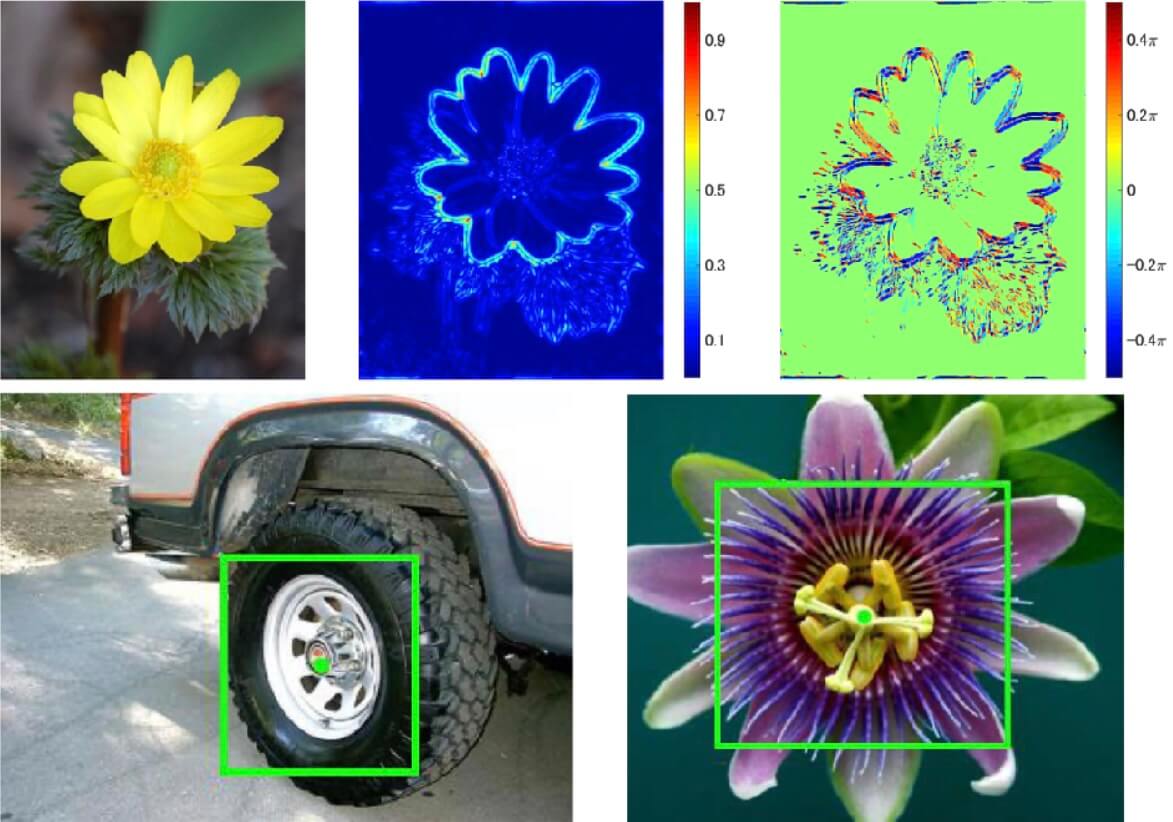
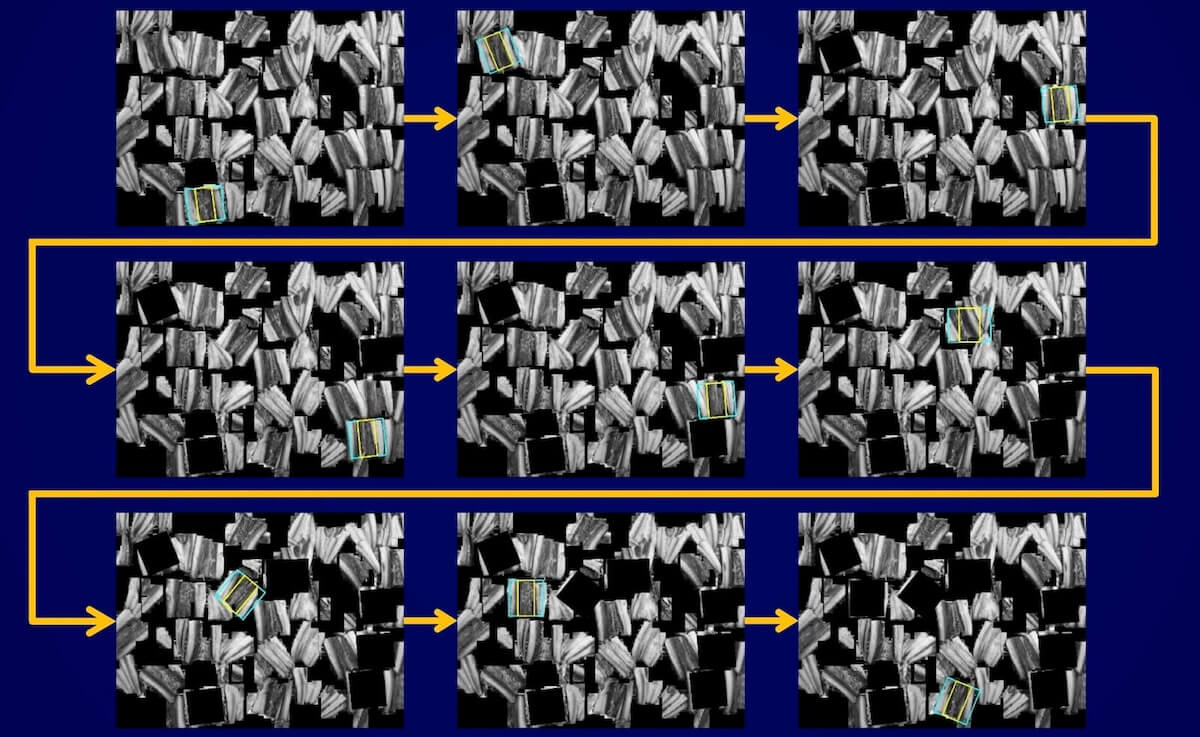
Center-Symmetrical Object Detection
Issue: How to detect center-symmetrical objects and identify their centers in arbitrary images?
Method: Gabor wavelet analysis.
Result: Our method accurately detects center-symmetrical objects and their central points.
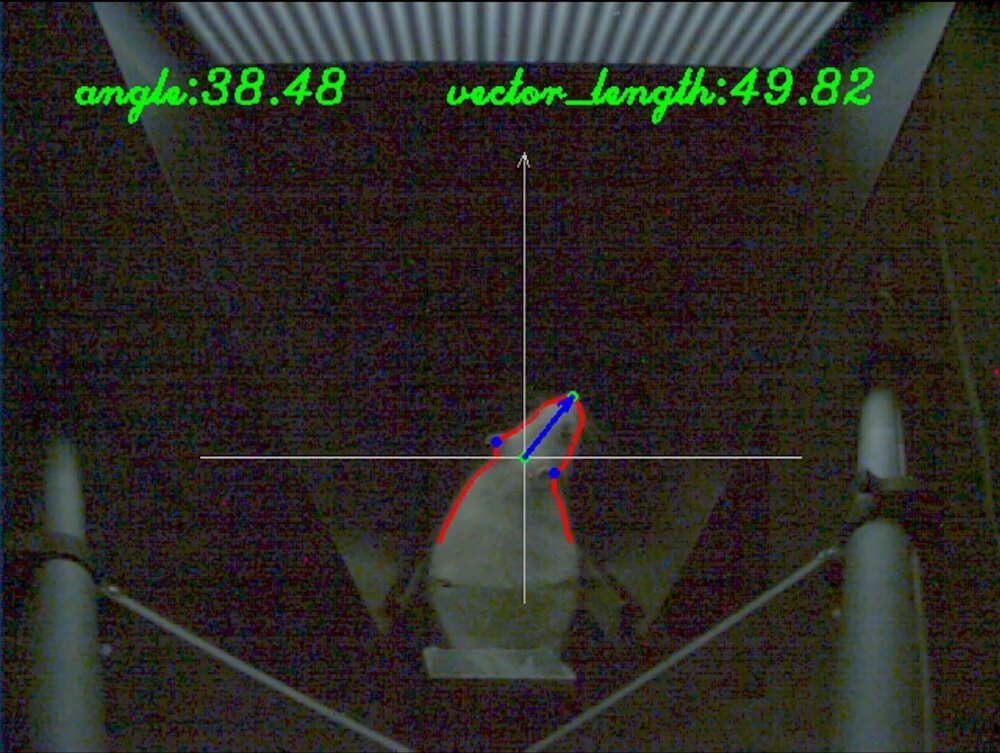
Rat Sensing
Issue: How to analyze rat behavior using the optomotor response automatically?
Method: Contour line curvature analysis.
Result: We present a system that automatically extracts the rat’s head gaze orientation from each frame.
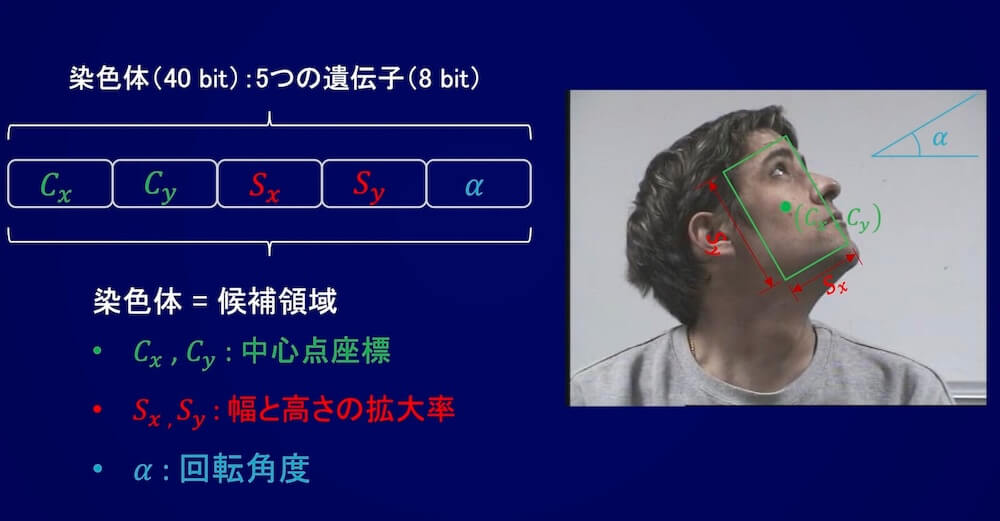
Real-time Profile Face Detection
Issue: How to speedup profile face detection?
Method: Dynamic image processing.
Result: We propose a method based on genetic algorithms.
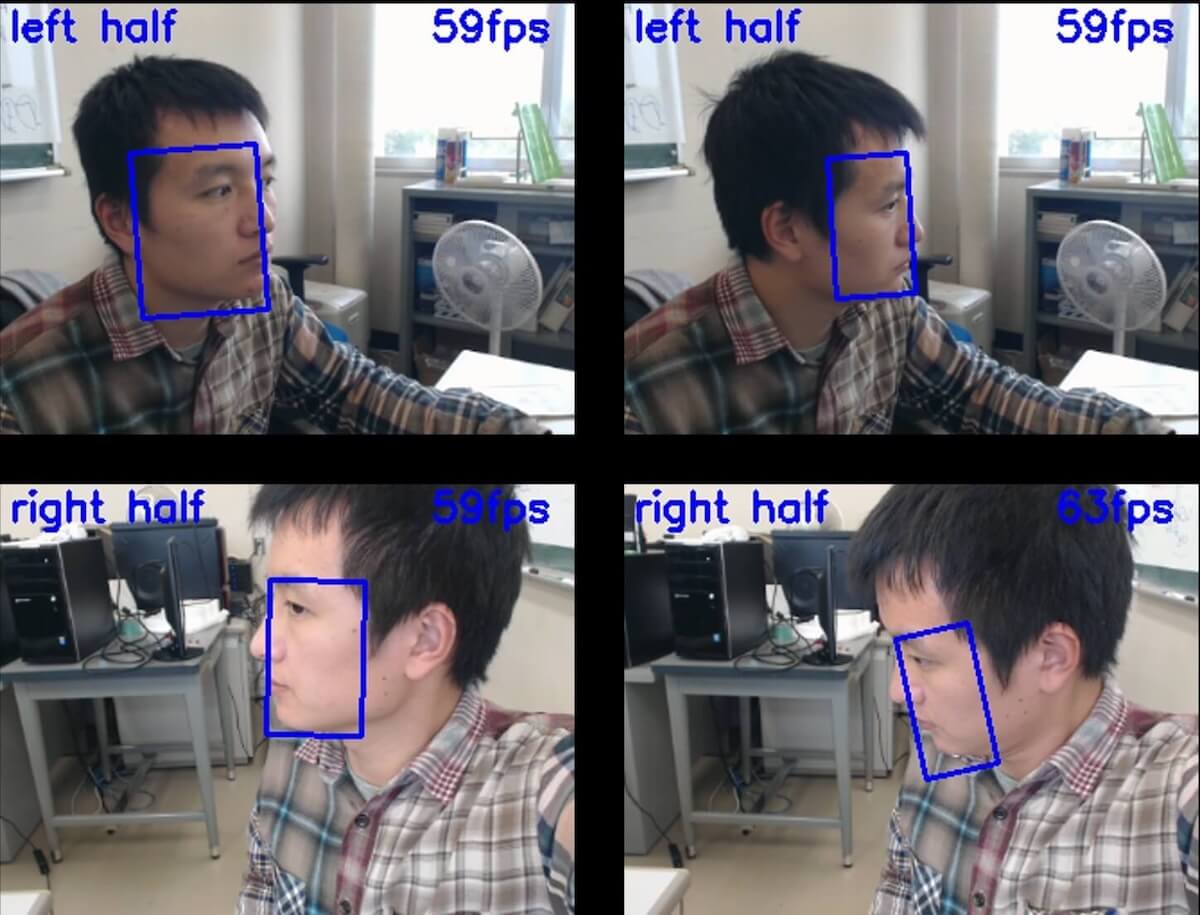
Multiview Face Detection
Issue: How to detect various views of human face?
Method: Flipping Scheme.
Result: We propose a method to enhance the capability of frontal face detectors to detect multi-view faces.
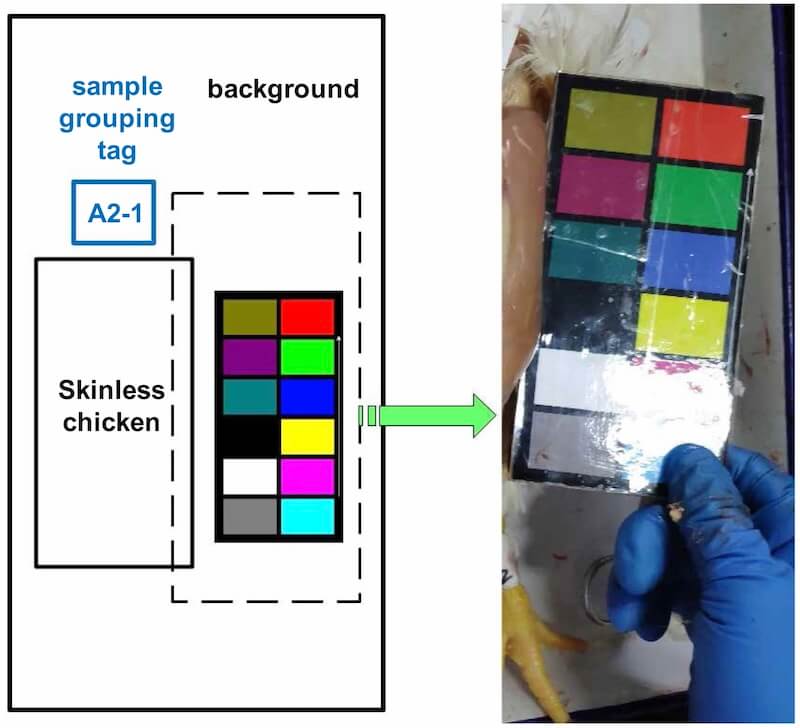
Chicken Meat Quality Evaluation by Color
Issue: The objective is to evaluate color related to chicken meat freshness objectively, non-destructively, and without contact.
Method: We use smartphone images and a color card to perform automatic color correction and image analysis with a low-cost method.
Result: Hierarchical clustering of corrected color information showed that chicken meat quality can be classified into three levels.
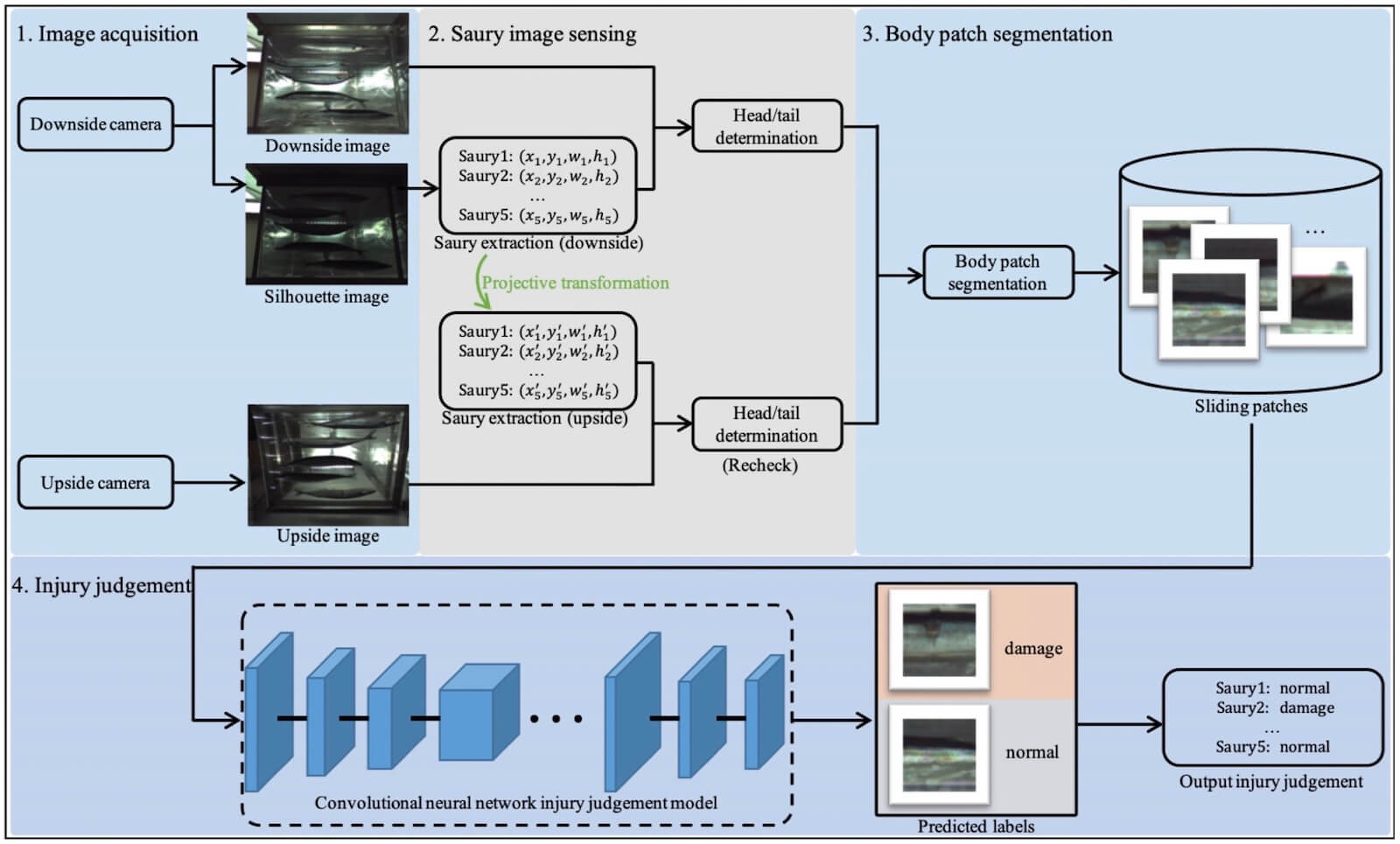
Damage Detection in Pacific Saury
Issue: In packaging processes, external damage is inspected manually, which creates a heavy workload.
Method: The body region and head-tail direction are automatically determined, and a CNN is used to detect surface damage.
Result: A transfer learning model achieved 98.2% accuracy in damage classification.
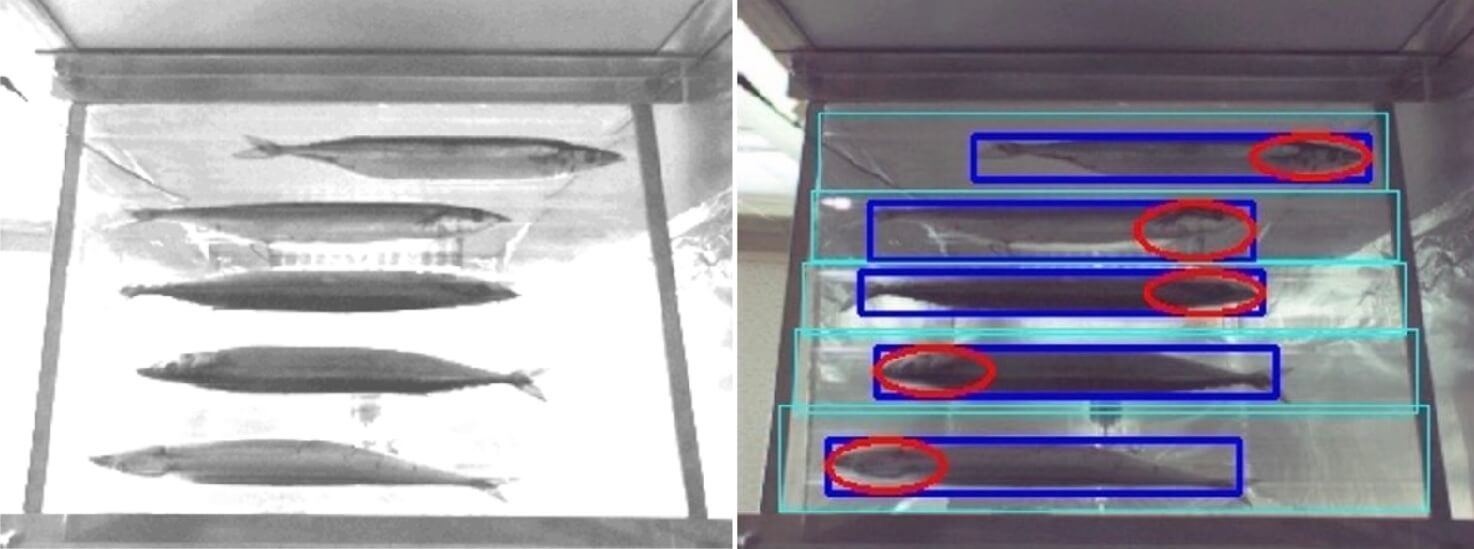
Head-Tail Orientation Detection for Pacific Saury
Issue: Packaging processes require fish to be aligned with consistent head-tail orientation.
Method: Custom contour-rule-based head-tail judgment.
Result: We proposed body extraction and head-tail judgment methods that enable fast processing suitable for packaging pipelines.
Kabayaki Canned Food Production
Issue: Automation of a kabayaki canned food production line.
Method: Template matching.
Result: A simulation was developed to prioritize candidates with high fitness values and determine the grasping order for a robotic arm.
Line Filter Design
Issue: How to design a super-fast defect detector over flat surface?
Method: Custom line filter design.
Result: We propose a series of line filters tailored to detect defects on surfaces that are flat or exhibit directional flatness along the x-axis, y-axis, or diagonals.